Програмне забезпечення — це те, що перетворює звичайний політ на виконання завдання. Від охорони кордонів до обробки полів — саме програма визначає, як БПЛА взаємодіють зі світом: що вони бачать, як приймають рішення та реагують у режимі реального часу.
Ось чотири приклади використання програмного забезпечення, які ви можете легко застосувати вже сьогодні.
1. Автоматизоване виявлення вторгнень
Стаціонарні вежі з відеоспостереженням мають свої переваги, але також і багато обмежень для охорони периметра. Спеціалізовані програми перетворюють БПЛА на інтелектуальні системи безпеки. Завдяки комп’ютерному зору з розпізнаванням об’єктів на основі штучного інтелекту дрони здатні:
- виявляти сторонніх осіб
- розпізнавати номерні знаки транспортних засобів
- фіксувати підозрілу активність
- сповіщати про несанкціоноване проникнення
- розрізняти цілі “свій-чужий”
- записувати інциденти та додавати їхні геотеги
- самостійно переслідувати рухомі цілі
Команда дослідників із Великої Британії та США розробила глибоку нейронну мережу для інтелектуального виявлення вторгнень, яка не потребує багато ресурсів. Застосувавши методи дистиляції знань та “обрізання” моделі, вони значно зменшили навантаження на процесор і вимоги до пам’яті без втрати ефективності.
Під час тестування система досягла точності виявлення вторгнень на рівні 99,61%, перевищивши попередній результат у 99,37%. Час опрацювання був скорочений більш ніж на 80%, а розмір моделі — майже на 90% у порівнянні зі стандартними CNN-системами. Це означає, що цю модель можна використовувати навіть на легких безпілотниках, зокрема на платформах на кшталт Osiris Drone OS.
2. Управління роєм
Раніше для управління групою дронів потрібні були кілька операторів. Зараз це робить спеціальна програма, використовуючи mesh-мережу та обмін оперативною інформацією.
Наприклад, можна запрограмувати всі БПЛА працювати за одним протоколом місії — обмін телеметрією, регулювання висоти та автономний розподіл завдань — використовуючи відкритий набір програм для польотів, спілкуючись через MAVLink і ROS 2 у mesh-мережі. Це дозволяє обмінюватися телеметрією та автономно розподіляти завдання між дронами в рої. Застосовуючи додаткові програми ШІ, можна покращити контроль формування, уникнення перешкод і загальну логіку прийняття рішень.
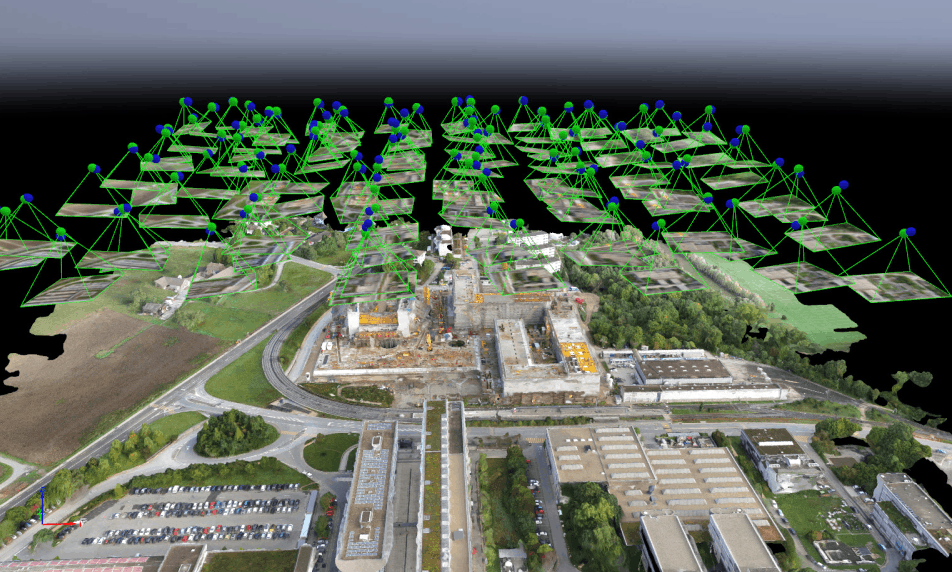
3. Фотограмметрія
Програмне забезпечення для дронів також змінило картографування. Коли успіх місії залежить від точності, саме програми для фотограмметрії забезпечують потрібний рівень деталізації. За допомогою спеціальних програм БПЛА можуть виконувати автономні зйомки, фіксуючи зображення з каліброваною точністю по всіх осях. Зареєстровані дані польоту — положення, кут нахилу, експозиція — обробляються ШІ-алгоритмами для створення високоточних 3D-мап місцевості.
PIXDcatch забезпечує 3D-точність до сантиметрів за допомогою RTK, що пришвидшує збір даних без втрати точності. UgCS з LiDAR дає одну з найнижчих похибок по AGL на складному рельєфі та бездоганний автоматичний політ. Також можна будувати складні лінійні та коридорні маршрути за допомогою інтегрованих інструментів планування місій.
У всіх випадках такі програми скорочують години польоту під час виснажливих місій, дозволяючи проводити надточні зйомки на важкодоступній місцевості без ризику для персоналу.
4. Точне землеробство
Сільське господарство не повинно бути грою в здогадки. Завдяки програмам для дронів, які аналізують мультиспектральні зображення та інформацію з датчиків через моделі ШІ, кожне поле стає живою картою свого стану. Фермери можуть:
- створювати ортомозаїки
- аналізувати густоту рослинності
- оцінювати стан посівів
- застосовувати точкові обробки
- виявляти проблеми зрошення та зони з дефіцитом вологи
- будувати карти розподілу поживних речовин
- виявляти бур’яни чи пошкодження шкідниками
- оцінювати потенційну врожайність
- відстежувати маршрути техніки для оптимізації обробки полів
Наприклад, дрон із подвійною RGB/мультиспектральною камерою може визначати відбиття в ближньому інфрачервоному діапазоні, щоб виявляти проблеми рослин на ранньому етапі. А NDVI чи теплові дані дають змогу знаходити проблеми поливу або дефіциту поживних речовин ще до того, як вони стануть очевидними. Ці дані можна передати в системи змінної норми внесення, щоб автоматично визначати, яку кількість добрив або пестицидів має отримати кожна зона.
Головна перевага програмного забезпечення для дронів
Майбутнє БПЛА визначатиметься програмним забезпеченням не менше, а можливо й більше, ніж характеристиками обладнання. Програмні платформи на кшталт Osiris OS об’єднують навігацію, програми та управління місіями в єдину систему. Це дозволяє розробляти, розгортати та керувати широким спектром програм для вашої місії.
Ви можете запускати програми для розпізнавання об’єктів або фотограмметрії прямо на дроні. Синхронізуйте журнали, дані місій та аналітику в хмарі або спочатку обробляйте їх локально, не турбуючись про безпеку або масштабованість місії.
Дізнайтеся про всі можливості Osiris Drone OS.





