Протягом багатьох років навчання пілотування дронів відбувалося за знайомим сценарієм:
вивчити конструкцію літального апарата, опанувати управління, накопичити льотні години, скласти сертифікаційний іспит — і після цього літати та заробляти.
Така модель була логічною в часи, коли БПЛА фактично були дистанційно керованими літальними апаратами з прикріпленою камерою. Але сьогодні все інакше.
З появою дронів із розширеними можливостями автономності та більш гнучким управлінням через бортові програми пілотам потрібен дещо інший підхід до підготовки.
Три відмінності сучасного навчання з пілотування дронів
У міру того як БПЛА переходять від ручного пілотування до програмно-керованих систем, навички, необхідні операторам, також еволюціонують.
Так, конструкція літального апарата все ще має значення. Але це більше не точка входу до професії. Натомість пілотам потрібно навчитися працювати з (напів)автономним програмним забезпеченням і вміти миттєво переходити в режим повного управління, коли ситуація стає напруженою.
1. Навчання починається з програмного забезпечення, а не керування джойстиком
Раніше програми навчання робили акцент на ручному пілотуванні. Сьогодні ж більшість пілотів витрачають значно більше часу на розробку профілів місій у програмі контролера дрона — ще до практичних занять.
Пілотам потрібно впевнено почуватися в налаштуванні маршрутних точок, перевірці параметрів польоту та моніторингу автоматизованих режимів, а не бути в постійному режимі ручного управління. Їхня роль — контролювати процес і швидко приймати рішення у разі зміни умов.
Щоб стати висококласним пілотом, необхідно приділяти час вивченню можливостей бортової програми БПЛА, планувальника місій і логіки роботи корисного навантаження.
2. Програмне забезпечення дрона тепер самостійно визначає рівень безпеки
Безпека більше не зводиться лише до уникнення аварій. Тепер йде мова про передбачувану поведінку в умовах невизначеності. Коли погіршується сигнал GNSS або комп’ютерний зір дає збій в умовах низької контрастності, літальний апарат не стає небезпечним миттєво. Саме програмне забезпечення визначає, як БПЛА компенсує збої, знижує функціональність або перериває місію.
Оператори, які не розуміють ці логічні сценарії, фактично «сліпі» в найкритичніші моменти місії. Тому навчання з експлуатації дронів має обов’язково охоплювати такі питання:
- які припущення використовує стек автономності;
- як виглядають режими відмов до того, як ситуація загостриться;
- чим відрізняються резервні режими в різних конфігураціях;
- коли автоматичний режим безпечніший за ручне втручання.
Це особливо актуально для промислових, аварійно-рятувальних і оборонних операцій, де середовище за замовчуванням є непередбачуваним.
3. Симуляція стала основним інструментом навчання
Раніше накопичені години польоту були золотим стандартом компетентності пілота.
Сьогодні ж високоточні симулятори дають більше користі, до того ж набагато швидше.
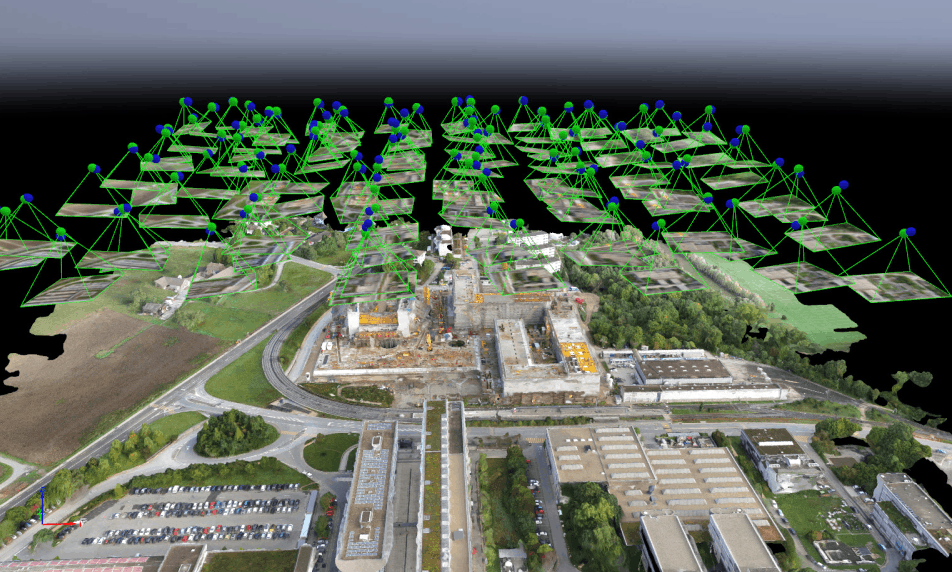
Програмні симулятори дронів дозволяють початківцям ознайомитися з рідкісними, ризикованими або непрактичними для відтворення в реальному польоті ситуаціями: погіршення сигналу GNSS, розбіжність даних датчиків, затримка передачі команд. Саме ці моменти визначають результат місії, і симуляція дає змогу операторам безпечно і багаторазово їх відпрацьовувати.
Щоб отримати реальну користь від симуляційного навчання, варто:
- Тренувати режими відмов разом із ходом виконання місій. Не обмежуйтеся ідеальними сценаріями. Свідомо фокусуйтеся на «складних кейсах». Вводьте відхилення від курсу, затримку телеметрії, часткову втрату даних датчиків або погіршення видимості посеред місії. Так ви розвиваєте ситуаційне мислення, а не лише м’язову пам’ять.
- Тренувати не тільки прийняття рішень, а й вибір часу для їх прийняття. Багато аварій трапляються через те, що правильну дію було виконано занадто рано або занадто пізно. Симуляція дозволяє побачити, скільки часу автономна система може самостійно виправляти ситуацію, перш ніж буде необхідне ручне втручання. Це розвиває стриманість, яка часто є ціннішою за швидкі рефлекси.
- Окремо тренувати моменти передачі управління. Один із найбільш ризикованих етапів в автономних операціях — перехід між автопілотом дрона та ручним управлінням. Симуляція має включати спеціальні вправи з передачі управління, щоб ви розуміли, в якому стані перебуває система в момент переходу та яких дій вона очікує далі.
У кінцевому результаті варто відпрацьовувати той самий сценарій із різними параметрами. Один прогін аварійної ситуації навчає розпізнаванню. Десять прогонів із невеликими варіаціями навчають розумінню. Змінюйте профілі вітру, вагу датчиків або обмеження місії та спостерігайте, як змінюється поведінка системи. Саме так ви навчитеся бути спокійним, зібраним і ефективним у будь-якому середовищі.
Підсумки
Сучасні дрони залежать від програмного забезпечення не менше, ніж від конструкції корпусу. Планувальники місій, логіка автономності, об’єднання даних датчиків і резервні сценарії визначають, як БПЛА будуть працювати після зльоту.
Ефективне навчання з пілотування дронів має відображати цю реальність. Воно повинно навчити усвідомлено планувати місії, інтерпретувати поведінку системи в режимі реального часу та приймати впевнені рішення, коли умови змінюються. Навички пілотування все ще важливі, але вони найефективніші у поєднанні з глибоким розумінням роботи базових систем.
У міру того як автономність стає стандартом, а операції — складнішими, найсильнішими операторами стають ті, хто навчається працювати в унісон із програмним забезпеченням. Спочатку освойте систему, і корпус стане інструментом, на який ви зможете покластися в будь-яких умовах.