Drone flights rarely go astray during take-off (and when they do, it’s the easiest scenario to troubleshoot). What’s far more critical is the final approach maneuvers, especially in high-stakes missions like precision targeting or close-to-structure work. Even the smallest errors become very taxing.
Terminal guidance systems are thus crucial for these final stages as they ensure precision, timing, and reliability during critical ‘last touch’ operations.
What’s the Role of Terminal Guidance in UAV Platforms?
In UAV architecture, navigation and terminal guidance systems serve two different purposes.
Mid-course navigation uses the drone flight controller to generate waypoint logic, interpolate between coordinates, and maintain a predefined route using GNSS and inertial estimates. It is optimized for efficiency and coverage, ensuring the UAV glides from origin to destination within acceptable deviation thresholds.
Terminal guidance, in turn, takes over when the drone reaches its objective (e.g., a fixed coordinate or a tracked moving target). The system tunes from optimizing flight trajectory to position correction. The tolerance for deviation narrows. Small errors that were negligible en route become operationally significant.
The flight controller must now operate at higher update rates, ingesting vision, inertial, and positional inputs to issue rapid micro-adjustments. Sensor data must be processed at a higher frequency. Corrections become smaller and more deliberate. The system must continuously reconcile perception inputs with physical motion while compensating for GNSS degradation, wind disturbance, and target movement.
To ensure all of the above happens without a hitch, terminal guidance typically requires:
- High-frequency control loop updates
- Real-time interpretation of vision or inertial sensor inputs
- Compensation for GNSS drift or signal interference
- Fine-grained lateral and vertical stabilization
- Predictive trajectory adjustments for moving targets
Perception, compute, and actuation must operate within the same tightly coupled system, minimizing latency between detection and correction. Sensor inputs can’t wait in queues or depend on unstable external links. They must be processed locally, with inference cycles fast enough to keep pace with physical motion.
For that, you’ll need a powerful enough onboard compute to handle real-time vision workloads, direct integration with the flight controller to avoid middleware delays, and a control loop tuned for high-frequency updates without oscillation. The system must also fuse multiple data sources (e.g., vision, inertial measurements, barometric inputs), so that no single degraded signal compromises stability.
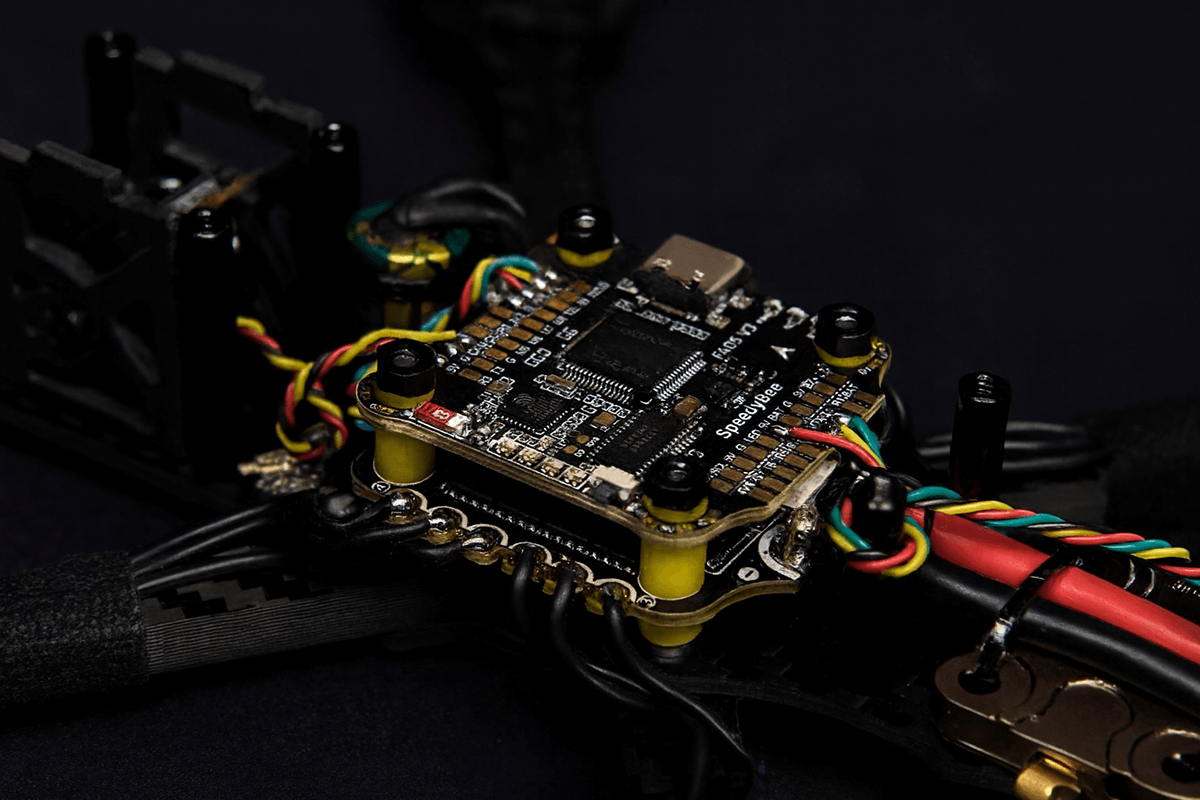
Modern AI terminal guidance modules like OSIRIS Al Terminal Guidance Flight Controller enable the above. It combines high-frequency sensor fusion, real-time NPU processing, and tight control loop integration inside a compact hardware footprint. This way, perception outputs transform into navigation adjustments with minimal latency.
How Terminal Guidance Improves ISR
ISR missions require stable hover, continuous target tracking, and position hold under interference or environmental disturbance. Even the slightest drift during observation can distort analysis or reduce perimeter accuracy.
AI-enabled terminal guidance strengthens ISR performance by:
- Maintaining persistent positional lock over a target or perimeter, even under wind disturbance or minor GNSS drift.
- Reducing hover drift through continuous micro-corrections based on real-time vision and inertial inputs.
- Improving moving target tracking with predictive trajectory adjustments rather than reactive repositioning.
- Tightening control loop response times to prevent overshoot during rapid maneuvers or altitude adjustments.
How Terminal Guidance Improves Payload Delivery
Drones are often sent to fly high-precision payload delivery missions: medical supply drops in disaster zones, sensor deployment on offshore platforms, or even autonomous resupply missions.
All of these scenarios require surgical accuracy at the last lag. But operating conditions often throw a spanner in the works — strong wind gusts, latency, or altitude variability. Advanced terminal guidance systems help minimize the impact of these variabilities through fine-grained descent control and continuous trajectory refinement.
So you benefit from:
- Lower circular error probable
- Higher drop accuracy
- More reliable release timing
- Improved wind compensation,
- Reduced overshoot and rebound effects
How Terminal Guidance Improves Autonomous Strike Accuracy
Some of the best drone interceptors earned their praise thanks to exceptional terminal guidance capabilities. At long range, speed and route optimization all matter. But in the last 300 meters, timing, correction frequency, and control loop precision determine the outcome.
Moving targets rarely follow clean vectors. Wind shifts. Relative velocity changes. Small latency spikes inside the control loop compound into measurable deviation. Once again, advanced terminal guidance systems mitigate these variables through high-frequency updates and predictive modeling that anticipate, rather than react to, motion.
Edge-based terminal guidance, in particular, enables deterministic inference cycles and direct integration with the flight controller, allowing perception outputs to translate into immediate actuation. With that, autonomous systems maintain alignment even under interference or rapid target movement.
Conclusion
Terminal guidance is where autonomy proves itself. Mid-course navigation can tolerate approximation. The final approach cannot. Whether the mission involves ISR stability, precision payload delivery, or autonomous interception, the decisive moment arrives when correction windows narrow and environmental variables intensify. At that point, architecture determines outcome.
If you want to strengthen your platform’s terminal performance, consider the OSIRIS Al Terminal Guidance Flight Controller. Learn more about how our AI-enabled module can elevate your drone’s precision, resilience, and operational reliability at the most critical flight stages.