Drone software is what separates flight from function. From border defense to crop management, it defines how UAVs interact with the world — how they see, decide, and respond in real time.
And here are the four software-defined use cases you can easily deploy today.
1. Automated Intrusion Detection
Fixed CCTV towers have their merit, but also a host of drawbacks for perimeter security. Specialized drone software can turn UAVs into intelligent security platforms. Thanks to computer vision with AI-based object recognition, drones can:
- Detect unauthorized personnel
- Run vehicle license plate recognition
- Track suspicious activities
- Alert about perimeter breaches
- Distinguish friend-or-foe targets
- Record and geo-tag incidents
- Follow moving targets autonomously
A joint UK-US research team developed a light-weight deep neural network for intelligent intrusion detection. By applying the knowledge distillation and model pruning techniques, the team significantly reduced computational load and memory requirements without sacrificing the model performance.
During validation, the system achieved an intrusion detection accuracy of 99.61%, beating the previous benchmark of 99.37%. More impressively, the inference time was reduced by over 80% and the model size by up to 90% compared to standard CNN-based systems. Meaning the model can be deployed even on lighter-weight copters, with platforms like Osiris Drone OS.
2. Swarm Management
Coordinating multiple drones once required multiple operators. Now, swarm management software handles it all through mesh networking and shared situational intelligence.
For example, you can program each UAV to run a common mission protocol — exchange telemetry, adjust altitude, and distribute tasks autonomously — using an open flight stack,
communicating through MAVLink and ROS 2 over a mesh network. This enables telemetry exchanges and autonomous task distribution between drones in the swarm. By deploying extra AI apps, you can also improve formation control, obstacle avoidance, and general decision-making logics.
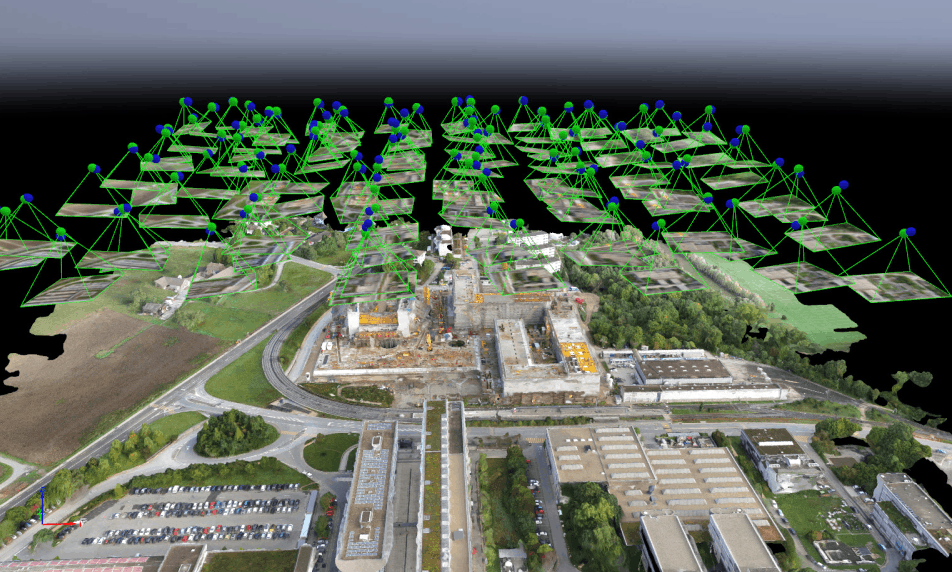
3. Photogrammetry
Drone software also redefined mapping. When accuracy defines mission success, photogrammetry software delivers. With the right software, UAVs can run autonomous grid missions, capturing overlapping imagery with calibrated precision across every axis. Logged flight data — from position to pitch and exposure — is then processed through AI-enhanced engines to generate high-resolution 3D terrain maps.
PIXDcatch delivers centimeter-level 3D accuracy with RTK. Speed up data capture without compromising on accuracy. UgCS with LiDAR offers one of the lowest AGL errors on steep terrain and impeccable automatic flights. You can also build advanced linear and corridor routes with integrated mission planning tools.
In each case, the apps shave off hours of flight time from otherwise tedious missions, enabling ultra-detailed scans without risking surveyors on unstable ground.
4. Precision Agriculture
Farming doesn’t have to be a guessing game. With drone software processing multispectral imagery and sensor data through AI models, every field becomes a live map of its own condition. Farmers can:
- Generate orthomosaics
- Run stand count analysis
- Perform plant health assessments
- Apply targeted treatments
- Detect irrigation leaks and water stress zones
- Map nutrient distribution
- Identify weed infestations or pest damage
- Estimate yield potential
- Track machinery paths to optimize field coverage
For instance, a drone equipped with a dual RGB/multispectral camera can determine the near-infrared reflectance of plants to identify early plant stress. Or you can use NDVI or thermal data to detect irrigation issues or nutrient deficiencies before they’re visible to the eye. And this data can then be fed to variable-rate application systems to automate how much fertilizer or pesticide each zone receives.
The Big Upside of Drone Software
The future of UAVs will be defined as much (if not more) by software than hardware. Drone software platforms like Osiris OS integrate navigation, mission control, and application management into a unified system. With that, you can develop, deploy, and manage a wide range of apps for your mission.
Run object detection or photogrammetry software directly on the drone. Sync logs, mission data, or collected insights to the cloud or pre-process them locally — without worrying about mission security or scalability.
Discover all Osiris Drone OS features.





